龍華龍華科技大學研發長
講座題目:以模糊控制為基礎之自動導航車
講師:潘亞東 博士
講座主持人:孔光源教授
記錄人:劉佳俊
指導教授:林明俊、孔光源教授
日期:100/9/07 (週三) 15:10~17:00
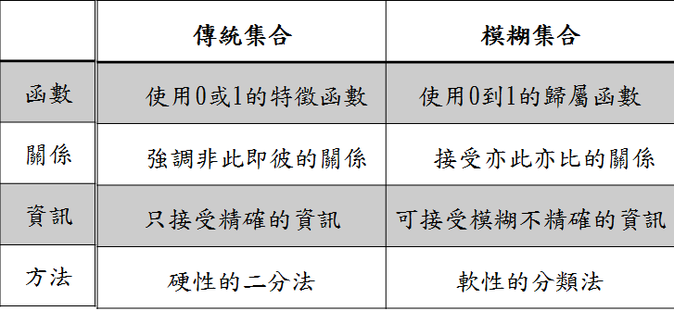
傳統集合與模糊集合的比較
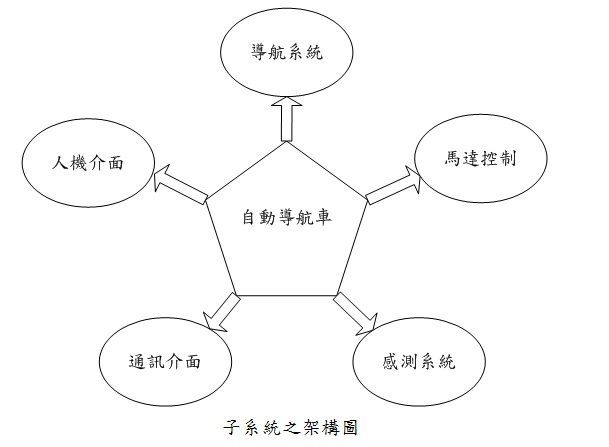
自動導航車子系統之架構
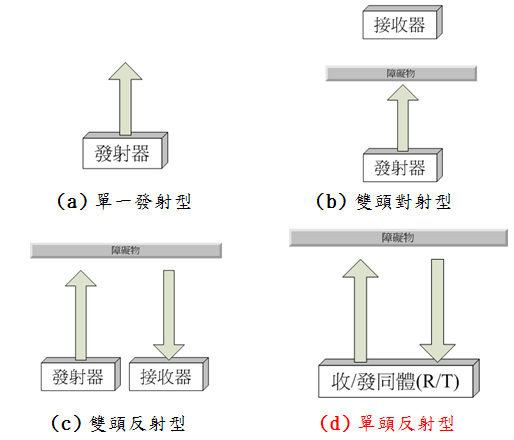
超音波感測器之檢測模式
以上資料擷取自 以模糊控制為基礎之自動導航車
龍華龍華科技大學研發長 潘亞東 博士
龍華龍華科技大學研發長 潘亞東 博士
心得:
聽完本次講座後,我模糊控制的基礎內容,有了更多的認識。尤其是聽到發展一台具有路徑規劃並具有避障功能之超音波自動導航車,我覺得好驚訝。原本我以為超音波是拿來測量距離用的,竟然發展到控制自動導航車的轉動角度及行走速度讓自動導航車避開障礙物,到達所指定之目標。
模糊控制是以模糊集合理論、模糊語言變數及模糊邏輯推論為基礎的一種智慧型控制法。使用模糊控制理論設計控制器的優點是,可以在不了解受控體的數學模型下,使用專家知識及經驗來設計控制器,進而使整個控制系統達到我們的性能要求。
傳統集合中,只取0與1兩個特徵函數值來描述一個集合只能表現「非此即彼」的現象,對於某些客觀事物在中間過渡時所呈現「亦此亦彼」的差異性卻無法有效處理。模糊集合可視為傳統集合的擴展,以取無限點的歸屬函數值來描述一個集合從二值邏輯的基礎擴展至連續多值。
模糊控制理論發展至今,模糊推論的方法大致可分為三種,第一種推論法是依據模糊關係的合成法則,第二種推論法是依據模糊邏輯的推論法簡化而成,第三種推論法和第一種相類似,只是其後件部分改由一般的線性式組成的。
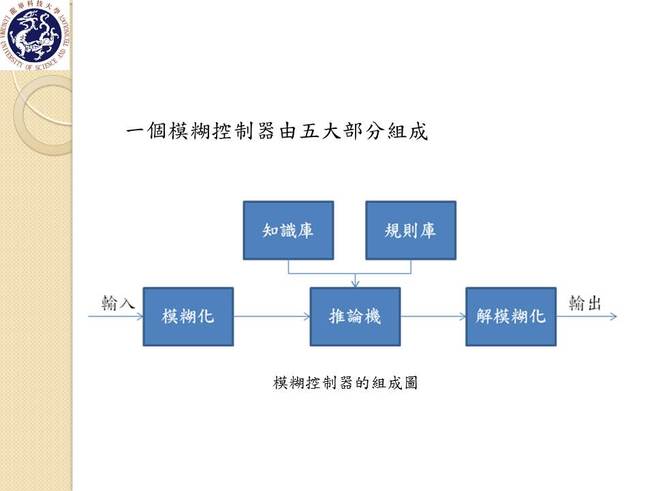
模糊控制是以模糊集合理論、模糊語言變數及模糊邏輯推論為基礎的一種智慧型控制法,模糊控制是由五大部分組成,1.模糊化2.推論機3.知識庫4.規則庫5.解模糊化,可以在不了解受控體的數學模型下,使用專家知識及經驗來設計控制器,進而使整個控制系統達到我們的性能要求。
聽完本次講座後,我模糊控制的基礎內容,有了更多的認識。尤其是聽到發展一台具有路徑規劃並具有避障功能之超音波自動導航車,我覺得好驚訝。原本我以為超音波是拿來測量距離用的,竟然發展到控制自動導航車的轉動角度及行走速度讓自動導航車避開障礙物,到達所指定之目標。
模糊控制是以模糊集合理論、模糊語言變數及模糊邏輯推論為基礎的一種智慧型控制法。使用模糊控制理論設計控制器的優點是,可以在不了解受控體的數學模型下,使用專家知識及經驗來設計控制器,進而使整個控制系統達到我們的性能要求。
傳統集合中,只取0與1兩個特徵函數值來描述一個集合只能表現「非此即彼」的現象,對於某些客觀事物在中間過渡時所呈現「亦此亦彼」的差異性卻無法有效處理。模糊集合可視為傳統集合的擴展,以取無限點的歸屬函數值來描述一個集合從二值邏輯的基礎擴展至連續多值。
模糊控制理論發展至今,模糊推論的方法大致可分為三種,第一種推論法是依據模糊關係的合成法則,第二種推論法是依據模糊邏輯的推論法簡化而成,第三種推論法和第一種相類似,只是其後件部分改由一般的線性式組成的。
模糊控制是以模糊集合理論、模糊語言變數及模糊邏輯推論為基礎的一種智慧型控制法,模糊控制是由五大部分組成,1.模糊化2.推論機3.知識庫4.規則庫5.解模糊化,可以在不了解受控體的數學模型下,使用專家知識及經驗來設計控制器,進而使整個控制系統達到我們的性能要求。
決定模糊控制規則的流程
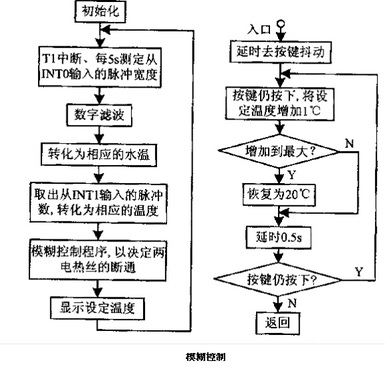
模糊控制設計模糊控制規則時,是在所設想對控制對象各階段之反應,記述採取那一種控制比較好;首先選擇各階段的特徵點,記錄在模糊控制規則的前件部,然後思考在該點採取的動作,記錄在模糊控制規則的後件部。

